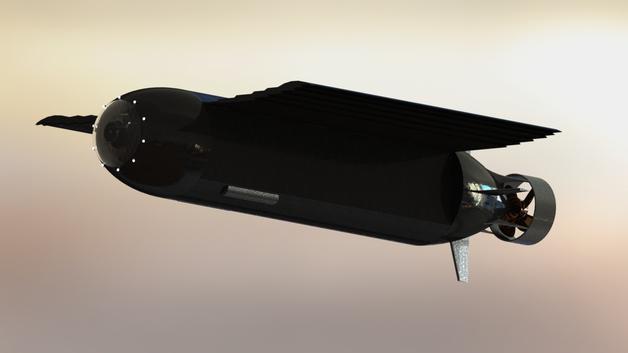
El proyecto SIRENA (Sistema Integrado de Reconocimiento y Exploración Naval Autónomo es un proyecto multidisciplinar creado y dirigido por estudiantes de la Universidad Politécnica de Cartagena con el objetivo principal de diseñar y construir un submarino robotizado, tambien conocido como AUV (Autonomous Underwater Vehicle) dotado de un sistema retráctil de captación solar que no perjudique las características hidrodinámica del vehículo.
Con una clara vocación multidisciplinar un grupo de alumnos de los diversos grados que se imparten en la UPCT se pusieron de acuerdo en realizar un proyecto ambicioso con el único fin de aprender, poner en práctica lo aprendido y conocer lo que es tomar decisiones y adquirir responsabilidades.
El proyecto SIRENA ha sido organizado con visión empresarial, no dándole importancia únicamente a los aspectos de ingeniería sino también a los empresariales. Como consecuencia de este sistema organizativo empleado se han involucrado en el proyecto alumnos de muy amplia índole de estudio como de Ingeniería Electrónica, Telemática, Industrial, Telecomunicaciones, Arquitectura Naval e Ingeniería en Sistemas Marinos y Dirección y Administración de Empresas.
La organización de los diferentes procesos del proyecto han sido establecidos utilizando como referencia la norma internacional ISO 9001:2008, siendo los más destacables; estudio de viabilidad, fase del arte, establecimiento de requisitos, diseño previo, implementación, construcción y pruebas.
Los requisitos académicos se tienen muy en cuenta y por lo tanto la pertenencia a este proyecto se considera un complemento a la actividad académica donde poder aplicar los conocimientos adquiridos, nunca será un sustitutivo de esto, garantizando así que todo miembro perteneciente a dicho proyecto tiene un buen rendimiento académico.

Se ha establecido un sistema organizativo para mejorar el rendimiento del proyecto y dividir las responsabilidades.
Project Manager. Responsable del correcto avance del proyecto, de la consecución de los objetivos y de que estos guarden relación con los requisitos establecidos.
Team Manager. Responsable del equipo al cual ha sido asignado tomando las decisiones técnicas pertinentes para la correcta realización de las tareas.
El departamento de ingeniería está formado por los alumnos cuyos estudios académicos son de la rama técnica.
Con el fin de diferenciar correctamente las tareas a realizar por los diferentes miembros se ha dividido el departamento de ingeniería en 5 grupos o equipos.
En este equipo todas las tareas guardan relación con el casco resistente, el diseño estructural de ciertos elementos y el comportamiento hidrostático de todo el AUV en los diferentes estados de la mar.
Su objetivo es el garantizar la integridad estructural y el correcto comportamiento según los requisitos que hayan sido establecidos.
Este equipo será el encargado del estudio hidrodinámico, de la optimización de las formas para reducir al minimo la resistencia al avance, estudio de la maniobrabilidad y del sistema propulsor así como tambien la selección de estos sistemas.
El objetivo de este equipo es el garantizar una velocidad de crucero y punta según se establezca en los requisitos de cada misión a parte de estudiar el controlamiento dinámico del vehículo.
El equipo de sistemas auxiliares es el encargado de la realización de los diferentes sistemas exteriores e interiores los cuales harán posible la integración de otros sistemas necesarios para garantizar la operatividad global. Algunas de las tareas que se realizan por el equipo de sistemas auxiliares son:
1. Sistema de despliegue y pliegue de las alas.
2. Diseño de las sujeciones de los componentes
3. Sistema de tanques de lastre.
Este equipo es el encargado de la selección de los componentes eléctricos y electrónicos, del diseño y estudio de los diferentes circuitos eléctricos y electrónicos, de la integración de los diferentes componentes y del estudio e interpretación de las señales enviadas y recibidas de estos componentes.
El equipo de Software se encargará única y exclusivamente de la programación íntegra del dispositivo.
En el departamento de administración se tratan todos los temas relacionados con los asuntos legales, patrocinio e imagen corporativa. A su vez este departamento está dividido en diferentes equipos según la índole de su trabajo.
Este equipo se responsabiliza de realizar las comunicaciones con empresas exteriores u otras instituciones, busca de patrocinio así como también de nuevos integrantes.
El equipo de multimedia y web es el responsable de la realización de los diferentes videos promocionales, carteles para presentaciones, de la creación y mantenimiento de los perfiles de las diferentes redes sociales y de la página web.
En este equipo se realizarán todos los documentos legales que sean necesarios así como también se encargara de realizar la documentación de todos los miembros pertenecientes al proyecto.
1.- Diseño, desarrollo y construcción de un AUV de última tecnología que sitúe a la UPCT a la vanguardia mundial de este tipo de sistemas y permita a medio plazo poder ser presentado en las diferentes ferias mundiales de tecnología naval.
2.- Establecimiento de programas de colaboración e intercambio con otras universidades nacionales y extranjeras, que permitan a sus integrantes la adquisición de conocimientos avanzados en ingeniería.
3.- Consecución de acuerdos de colaboración con empresas tanto públicas como privadas, con objeto de impulsar la explotación comercial del proyecto y facilitar el acceso al mercado laboral de sus miembros cuando concluya su formación universitaria.
4.- Facilitación a los integrantes del proyecto en la realización del proyecto de fin de grado, master o doctorado.
http://upcommons.upc.edu/revistes/bitstream/2099/13924/1/Instrumentation_viewpoint_15%2057.pdf
http://www.laverdad.es/murcia/v/20131007/cartagena/estudiantes-upct-desarrollan-ayuda-20131007.html
Artículo revista "Ingeniería Naval" - http://media.wix.com/ugd/8d2a4b_d58553ac4eb641c2984a623406046414.pdfArtículo revista "Ingeniería Naval" - Artículo revista "Ingeniería Naval" -
Los motivos medioambientales que atañen al mundo, son la clara evidencia en la tendencia a aprovechar las energías renovables. Esta tendencia afecta indistintamente a todo vehículo o artefacto que precise de energía para su funcionamiento.
Un AUV es un vehículo submarino autónomo, de manera que este actúa en función del programa que se le haya predefinido. Normalmente este vehículo no concibe la inferencia humana durante la realización de una misión, reaccionando por lo tanto a las variables internas que el programador haya contemplado. El objetivo de la realización de un vehículo autónomo es conseguir que “haga algo” que tendría que hacer un humano, con el fin de evitar poner en peligro vidas, disminuir los costes de operación o simplemente hacer tareas que las capacidades humanas no pueden realizar. Razón de todo esto es por qué el uso de AUVs ha sufrido un crecimiento exponencial durante estos últimos años.
Los principales usos de los AUVs considerados como "grandes" son en el sector militar, el sector de la investigación oceanográfica, el sector petrolífero y el sector de cableado submarino.
Centrándose en el análisis del AUV orientado a aplicaciones militares, el uso para el cual está más generalizado es el de operaciones de medidas contraminas, MCM. En este tipo de operaciones, al AUV se le pone una carga explosiva la cual deja cerca de la mina.
“El sueño dorado de la Guerra Antisubmarina y de las operaciones MCM seria disponer de un sónar autopropulsado, es decir, a bordo de un UUV que pudiese autónomamente detectar, identificar, seguir y atacar cualquier blanco submarino estático o dinámico”
Actualmente existen sónares los cuales pueden ser incorporados en los AUVs por lo que uno de los puntos citados en el artículo publicado en la página web de Infodefensa ya estaría solucionado.
Ante lo citado arriba se pueden identificar los siguientes problemas,
I. Operar con el conjunto AUV - buque requiere un buen estado de la mar que no siempre es posible tener.
II. En la operación de largado y recogida del AUV se necesitan complejos sistemas que incrementan el fallo y la probabilidad de accidente.
III. Siempre que se requiere realizar una operación es necesarios el desplazamiento de un buque que traslade al AUV al lugar de la operación y quede en estado de espera hasta la finalización de la misión. Esto es debido a la reducida velocidad de desplazamiento y a la limitada autonomía energética que caracteriza a este tipo de vehículos.
Realzando la tendencia hacia el uso de energías renovables anteriormente mencionada, se conocen ya varios AUVs comerciales que han adoptado la implantación de placas solares. Uno de ellos, es el SAUV (Solar Autonomous Underwater Vehicle) fabricado por FSI Inc. Este submarino ha optado por la implementación de paneles solares fijos situados en la parte superior del AUV. Esta solución que en principio soluciona la autonomía energética, merma enormemente las características hidrodinámicas del vehículo, haciendo que se necesite un motor que genera demasiado consumo y por lo tanto renunciando a la eficiencia que indiscutiblemente tiene que caracterizar a este tipo de dispositivos.
Estos problemas motivan al proyecto SIRENA a conseguir un producto que solvente todos los problemas anteriormente mencionados.
Desglosando los problemas anteriormente propuestos,
En primer lugar está la problemática del estado de la mar. Obviamente no se puede solucionar el estado de la mar pero si se puede hacer que esta variable no sea determinante.
En segundo lugar se encuentra el problema que se origina en el largado y la recogida del AUV al estar suspendido en el aire y en movimiento debido a los movimientos del buque, además de estar muy próximo al buque y a la tripulación del buque pudiendo originar accidentes que dañen a personas o bienes materiales de alto valor.
En tercer lugar, atendiendo al criterio económico, se puede afirmar que el buque militar hace la función de buque de transporte ya que el buque militar con toda su tripulación tendrá que desplazarse a una determinada zona para realizar una misión que solo el AUV puede desempeñar. Ante este problema hay dos variables que hace que sea inviable otra opción. Primero, la baja velocidad de los AUVs (4 o 5 nudos) haría que el desplazamiento a una determinada zona se llevase a cabo en un largo periodo de tiempo, segundo, que este desplazamiento haría que se consumiese la mayor parte de la energía almacenada en las baterías.
En la definición de AUV, autónomo se define únicamente como la capacidad de suficiencia operacional para realizar determinadas acciones preprogramadas. En cambio, cuando hablamos de autonomía, por ejemplo de un vehículo, es el tiempo que puede abastecerse de una fuente de energía interna sin tener que recargarla, siendo por lo tanto parcialmente autónomo. Por lo tanto se pueden definir dos autonomías, autonomía operacional y energética. Entonces, ¿AUV es una definición correcta para este tipo de vehículos?
Ante estas definiciones, se podría afirmar que SAUV de FSI Inc. Es un vehículo completamente autónomo ya que está provisto de un sistema fotovoltaico que le dota de una fuente de energía inagotable. Pero, ¿es la solución idónea?
En un cuerpo sumergido en movimiento se genera una resistencia al avance en la misma dirección y sentido opuesto al de avance del submarino. En el caso de cuerpos de revolución, las fuerzas son simétricas y se reparten uniformemente. En submarinos, la vela, el periscopio y otros periféricos que forman apéndices en el exterior del casco generan una resistencia al avance que puede llegar a ser un 20 % de la resistencia total del submarino. Esto es debido a la resistencia al avance propia de cada apéndice sumada a una resistencia residual que se genera en la unión del casco al apéndice. Además, hay un coeficiente que influye significativamente en el rendimiento hidrodinámico, llamado coeficiente de succión. Estas hechos son las que llevan a que los submarinos sean cuerpos de revolución, y que por lo tanto el rendimiento hidrodinámico del SAUV no sea el idóneo para aplicaciones en las que el consumo generado por la acción de desplazamiento es un factor determinante.
La solución al primer problema se podría conseguir aumentando la distancia a la que se lanza el AUV para que no haya probabilidad de choque entre el AUV y el buque.
La solución al segundo problema se podría conseguir aprovechando los sistemas de combate del buque para el lanzamiento del vehículo.
La solución al tercer problema se podría conseguir disponiendo de un sistema de captación de energía fotovoltaica, adoptando una solución que difiera de la de FSI que no merme las características hidrodinámicas del submarino.
La alternativa adoptada para la solución del primer y del segundo problema sería la del lanzamiento y recogida de SIRENA a través de un tubo lanzatorpedos con dimensiones OTAN.
Escogiendo esta alternativa de mejora, surgen diversos problemas técnicos y preguntas que hay que responder. Primero, ¿El lanzamiento será por diferencia de presión o autopropulsado?
La solución que menos afectaría a SIRENA sería la de que fuese autopropulsado ya que la presión circundante sería la exterior correspondiente a la columna de agua por encima de él. Por lo que en el lanzamiento, se igualarían las presiones y SIRENA saldría por sus propios métodos del tubo lanzatorpedos. El problema de optar por esta solución es que en caso de mal estado de la mar SIRENA podría dañarse al salir del tubo lanzatorpedos
La solución idónea en cambio sería la de que fuese un lanzamiento por diferencia de presión. Este método consiste en incrementar la presión del agua en el tubo lanzatorpedos de forma que cuando se abra la escotilla SIRENA salga lanzado por la acción de equilibrio de presiones, de forma que al salir con alta velocidad no se vería tan afectado por el movimiento del buque. El problema en este caso sería que SIRENA tendría que soportar el incremento de presión que se genera en el lanzamiento, además de que todas las sujeciones tendrán que aguantar los esfuerzos derivados de una aceleración elevada y repentina.
Para la recogida del AUV es de significativa importancia conocer su dinámica, de forma que el algoritmo de control pueda realizarse con total exactitud. Esta necesidad de completo control se traduce en la realización de diversas pruebas en canales de experiencias que aseguren que los resultados teóricos obtenidos mediante el análisis de fluidos sean exactos
Para la solución del tercer problema se ha dotado a SIRENA de un sistema de captación de energía fotovoltaica retráctil, el cual aparte de dar una elevada superficie de captación no afecta a las propiedades hidrodinámicas.
Ante esta solución se presentan diversas preguntas, ¿pueden aguantar las placas inmersiones cíclicas a 500m de profundidad? ¿Cómo afectará el biofouling al rendimiento de las placas solares?
La implantación de todas estas mejoras harían a SIRENA un dispositivo capaz de recorrer grandes distancias sin mermar las capacidades de operación, no necesitaría ser transportado por un buque al lugar de operación, se podrían cubrir grandes zonas en un tiempo menor, y, en caso de que sea inevitable la presencia del buque, la puesta en funcionamiento de SIRENA podría realizarse de forma sencilla y eficaz sin poner en peligro vidas humanas o bienes materiales.
SIRENA no es simplemente un AUV mas, es un concepto nuevo de diseño, operatividad, eficiencia, robustez y fiabilidad, incomparable a los AUVs presentes en el mercado.
Como se ha visto en el capítulo anterior, hay diversos factores que podrían determinar la viabilidad técnica de SIRENA. En resumen estos factores son,
1. Resistencia al incremento repentino de presiones a la hora del lanzamiento mediante tubos lanzatorpedos.
2. Resistencia de sujeciones al incremento repentino de velocidad.
3. Resistencia de las placas solares a inmersiones cíclicas a más de 500m de profundidad.
4. Rendimiento de las placas solares afectado por el biofouling.
5. Robustez del sistema de apertura de alas.
Los dos primeros factores están relacionados directamente con el propio diseño del submarino, de forma que dependerá únicamente del escantillonado. Este problema técnico tiene fácil solución pues y no será un factor crítico que condicione la viabilidad técnica.
El factor 3 y el factor 4 fueron analizados por una compañía. Las placas no se ven afectadas por la presión ya que se igualan presiones por ambos lados y al ser un medio sólido no presenta contracción. El biofouling por otro lado si tiene una clara incidencia sobre el rendimiento de las placas. Según estudios realizados por diversas compañías, el rendimiento de los paneles standard, estará por encima del 80% los 17 primeros días, y el de los paneles ligeros, por encima del 80% los 15 primeros días. Hay que tener en cuenta que estos datos corresponden a paneles que han estado en contacto permanente con el agua y con el sistema adoptado en SIRENA, los paneles no estarán siempre en contacto con el agua de forma que la duración de máximo rendimiento podría incrementarse.
La clave para el éxito de SIRENA corresponde al último factor, la robustez del sistema de apertura de alas. Con un diseño robusto SIRENA podría estar largas temporadas sin necesitar la intervención humana, podrá recorrer miles de millas sin tener ningún contratiempo y por lo tanto será un activo valioso para cualquier sector en el que se desee utilizar.
La investigación oceanográfica puede ser dividida en investigación oceanográfica de litoral y de alta mar.
En la investigación oceanográfica de litoral son común los AUVs de pequeño y mediano tamaño, esto es debido a que por lo general son operaciones en las que se necesita un mayor número de grados de libertad para facilitar su movilidad en entornos rocosos y con un gran número de obstáculos. También es debido a que normalmente son operaciones en las que la cota de operación no supera los 50m de profundidad.
Las investigaciones oceanográficas de litoral tienen como objetivo conocer determinados parámetros del agua que puedan afectar a la flora y la fauna de una zona en concreto, como por ejemplo, medidor de temperatura, de salinidad, de contaminación, etc.
En cambio, la investigación oceanográfica de alta mar si son característicos los AUVs de gran tamaño. Esto es debido a que las cotas de operación son muy altas, del orden de 500 a 6000m de profundidad y por lo tanto se requieren AUVs más voluminosos que puedan soportar estas presiones. También son necesarios estos AUVs ya que por lo general tienen una autonomía energética mayor.
Este tipo de operaciones son operaciones a gran escala de extensa duración. El objetivo de investigación en este tipo de operaciones es de índole muy diversa. Mirando hacia el futuro, se pretende tener un sistema que garantice la permanente observación remota para caracterizar los ecosistemas con una precisión hasta ahora inabordable. También es frecuente el uso en la búsqueda de manchas de petróleo, análisis migratorio de animales marinos como las ballenas y exploración ártica y antártica.
En lo que respecta a SIRENA, el uso dentro de la investigación oceanográfica de litoral se verá dificultado por ser un AUV de grandes dimensiones y tener un número inferior de grados de libertad al ideal.
En cuanto al uso de SIRENA dentro de la investigación oceanográfica de alta mar puede ser una solución altamente viable para la ejecución de tareas con una mayor efectividad y eficiencia. Al no tener que estar constantemente subiéndolo al buque para recargarle las baterías, podrían trabajar de manera conjunta el buque y SIRENA por lugares diferentes para así aumentar la cantidad de datos obtenidos en un tiempo inferior. Además, si se desease, no sería necesario la presencia del buque, ya que SIRENA podría trabajar de manera completamente autónomo. Optando por SIRENA cualquier institución oceanográfica tendría una ventaja considerable en la investigación oceanográfica.
En el sector militar el uso típico de AUVs se basa en las operaciones de medidas antiminas MCM. La operativa de estas misiones se basan en un buque, llamado cazaminas, el cual va explorando la mar en busca de minas, cuando localiza una, el AUV o ROV (Remotely Operated Vehicle) se sumerge y hace detonar la mina dejando caer una carga explosiva sobre ella.
Los AUVs utilizados presentan una cota de inmersión moderada, de 200 a 500m de profundidad. Son utilizados todo tipo de AUVs, de pequeño, mediano y gran tamaño.
SIRENA en este caso sería un gran activo que no precisaría del buque cazaminas para la detección de minas, de forma que pudiese explorar las zonas que se deseen de forma autónoma y sin poner en peligro vidas humanas y bienes materiales. El coste operativo bajaría, usando una multitud de SIRENAs que podrían cubrir grandes zonas aumentando por lo tanto la velocidad de exploración y aun así el coste operativo seguiría siendo menor. También podría trabajar en conjunto con el buque cazaminas para cubrir más terreno.
En este sector, SIRENA podría tener muchos más usos, como puede ser el de vigilar aguas nacionales, vigilar determinados lugares propensos de conflicto, controlar el tráfico marítimo, evitar el tráfico de pateras y el tráfico de drogas.
La revisión de cableado y de conductos submarino es una tarea que se realiza constantemente. Para ello se utilizan AUVs de grandes dimensiones que van escaneando los conductos y los cables submarinos. Estos cables se encuentran a una gran profundidad y por lo tanto los AUVs trabajan en cotas de hasta 6.000m de profundidad. El método operativo comienza cuando el buque está posicionado cerca del cable y lanza el AUV, el AUV se sumerge y revisa el cable o conducto, cuando le queda poca batería el AUV emerge, se carga la batería y se transmiten los datos. Repitiendo esta operación las veces que sea necesario hasta revisar todo el cable o conducto.
SIRENA podría trabajar de forma completamente autónoma sin la necesidad de tener al buque constantemente siguiéndole y generando costes inútilmente. Cuando localizase la avería, SIRENA subiría y comunicaría su posición para posteriormente ser reparada.
























