
¿Quién soy?
-Me llamo Quim Florencio Sánchez, soy un joven universitario que aun estudiando ingeniería eléctrica y trabajando de lo que me gusta, siempre encuentro un ratito para mis hobbies y para mis retos personales (robótica, cine).

-Esta vez estoy tratando de construir un robot utilizando material reciclado (un barril, pales viejos), así como el material de prácticas usado en asignaturas ya finalizadas (Arduino UNO).
¿Por qué de este proyecto?
-Soy una persona, a la cual le gusta y motiva a aprender todo lo relacionado con electricidad y energía en general, (generación, actuadores, almacenamiento, etc…), y de ahí que me haya forjado mi profesión con lo que más me apasiona, desde bien pequeño desmontaba y coleccionaba los bobinados de motores de corriente continua, primero juguetes estropeados, luego pequeños electrodomésticos como reproductores de video, batidoras, impresoras, etc…, incluso tengo guardados en casa unos cuantos motores universales de lavadora y secadoras (tengo a mi familia negra con mis colecciones).
-Estoy obsesionado con el tema del “Motor Perendev”, y el aprovechamiento de la energía magnética para la generación de energía eléctrica, sin aporte de energía externa, y de ahí que quiera dedicar mi proyecto de final de carrera a estrujarme el celebro para ver si puedo dar un aporte, por pequeño que sea, al mundo de la generación energética aumentando el rendimiento de este tipo de motores, pero eso es un tema que trataré más adelante.
-El proyecto del cual me enfrento ahora mismo, es el de construir un robot, orientado a todo tipo de usuarios, para dar a conocer a cualquier usuario tenga la edad que tenga, que todo es posible con dedicación y esfuerzo, desde aquellos que quieren iniciarse y aprender en que consiste la programación de pequeños autómatas, a estudiantes que quieran mejorar o perfeccionar tanto su lenguaje de programación así como sus conocimientos en actuadores y sensores.
-En mi canal personal de Youtube (Joaquin Florencio Sanchez) iré subiendo en forma de tutorial todos los pasos para la construcción de dicho robot, así como códigos, y links de artículos utilizados.
¿Cómo será robot?
-Se trata de un robot con apariencia y tamaño muy parecidos a R2D2 (Personaje de ficción del universo de Star Wars. Es un droide astromecánico, contraparte y amigo de C-3PO. En algunas partes, sobre todo en países hispanoamericanos, se lo conoce como «Arturito» debido a la similitud fonética del nombre pronunciado en inglés: R2-D2, Artoo-Detoo o Artoo-Deetoo (Ar tu-di tu)).

-Pesará alrededor de unos 20-22 kg, el cuerpo va ser un barril de 45cm de altura y 36 cm de diámetro en su parte más ancha y menos de 6 kilos.
-Las “piernas” son también de madera (pales viejos), con dos ruedas motrices y una de apoyo.

¿Que funciones, y características tendrá?
-Desplazamiento (delante, atrás, izquierda, derecha, rotación sobre sí mismo), con seis velocidades fácilmente graduables.
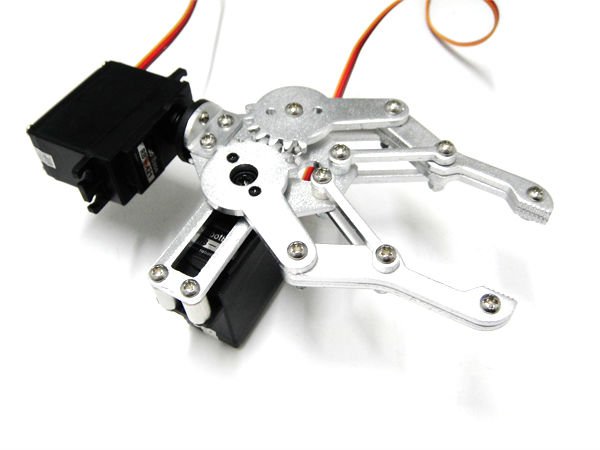
-Tiene una pinza de aluminio con un grado de libertad (fácilmente se puede aumentar a dos, o tres grados según convenga), con 3 velocidades fácilmente graduables.
 -Pose un detector de luz, que dependiendo si el robot va para delante, o para atrás y de la luz que detecte, se encienden focos de la parte delantera o trasera del robot automáticamente, focos que podemos encender o apagar cuando nos plazca de manera independiente al sensor de luz.
-Pose un detector de luz, que dependiendo si el robot va para delante, o para atrás y de la luz que detecte, se encienden focos de la parte delantera o trasera del robot automáticamente, focos que podemos encender o apagar cuando nos plazca de manera independiente al sensor de luz.
-Pose dos sensores de temperatura, uno en la parte interior del robot y otro amagado en la superficie, si detecta una diferencia de más de 10 grados del interior respecto del exterior, se encenderán dos ventiladores (uno en la parte inferior para entrar aire fresco y otro en la parte más alta para expulsarlo), apagándose cuando dicha diferencia sea igual a 5 grados.
-Pose dos pantallas LCD en el frontal, una para que muestre las dos temperaturas descritas anteriormente y el porcentaje de las baterías, y una segunda de reserva, para posibles ampliaciones de código.
-No choca, puesto que va prácticamente rodeado de sensores de ultrasonidos que detectan los obstáculos.

-No puede caer por las escaleras o cambios de nivel, pues detecta en todo momento el siguiente paso a realizar.
-Baterías de larga duración y ciclo profundo, aun así, en caso de que estas estén por debajo del 40%, el robot automáticamente se pondrá en modo ahorro (luces desactivadas, motores a 50% de su potencia) e irá a buscar su base de descanso (enchufe), para cargarse de nuevo.
-Tiene 10 leds con diferentes colores, para que muestre lo que nos interese por código, como por ejemplo: estados de la batería, (perfecta, bien, regular, mal), estado ventiladores, estado luces, estado de instrucción 1, o 2, etc..
¿Cómo se puede controlar?
-Me siento capaz de realizar el código genérico para que pueda ser controlado mediante:
-Cualquier mando a distancia (TV, A.A, etc...) (SEGURO)
-Mando PS3 (SEGURO)
-Cualquier dispositivo Android (PROBABLEMENTE)
-PC (PROBABLEMENTE)
-Apple (Ipad, Ipod, Iphone) (PROBABLEMENTE)
























